Visualization with Rerun
Rosia integrates with Rerun for visualizing node data over time. Rerun provides an interactive viewer that plots data against both logical and physical time.
Logging with log.rerun()
from rosia import log
import rerun as rr
Use log.rerun() to log any Rerun archetype from within a node:
log.rerun(archetype, rerun_subpath="...")
archetype— any Rerun component (rr.Points3D,rr.LineStrips3D,rr.Image,rr.TextLog, etc.).rerun_subpath— controls where it appears in the Rerun entity tree.
Data is indexed by both logical time and physical time, so you can scrub through the timeline in either mode.
Enabling Rerun
Pass a RerunConfig to app.execute() to enable Rerun logging:
from rosia.config import RerunConfig
app.execute(rerun_config=RerunConfig())
Optionally, pass a Rerun blueprint to configure the viewer layout:
import rerun.blueprint as rrb
app.execute(
rerun_config=RerunConfig(
blueprint=rrb.Blueprint(rrb.Spatial3DView(origin="/"))
)
)
Enabling Tracing
Pass trace=True to app.execute() to enable automatic tracing. When tracing is enabled:
- All input port values are automatically logged to Rerun on each reaction.
- Text log messages from
log.info(...),log.debug(...), etc. appear in the Rerun timeline.
app.execute(trace=True, rerun_config=RerunConfig())
Full Example: Bouncing Ball
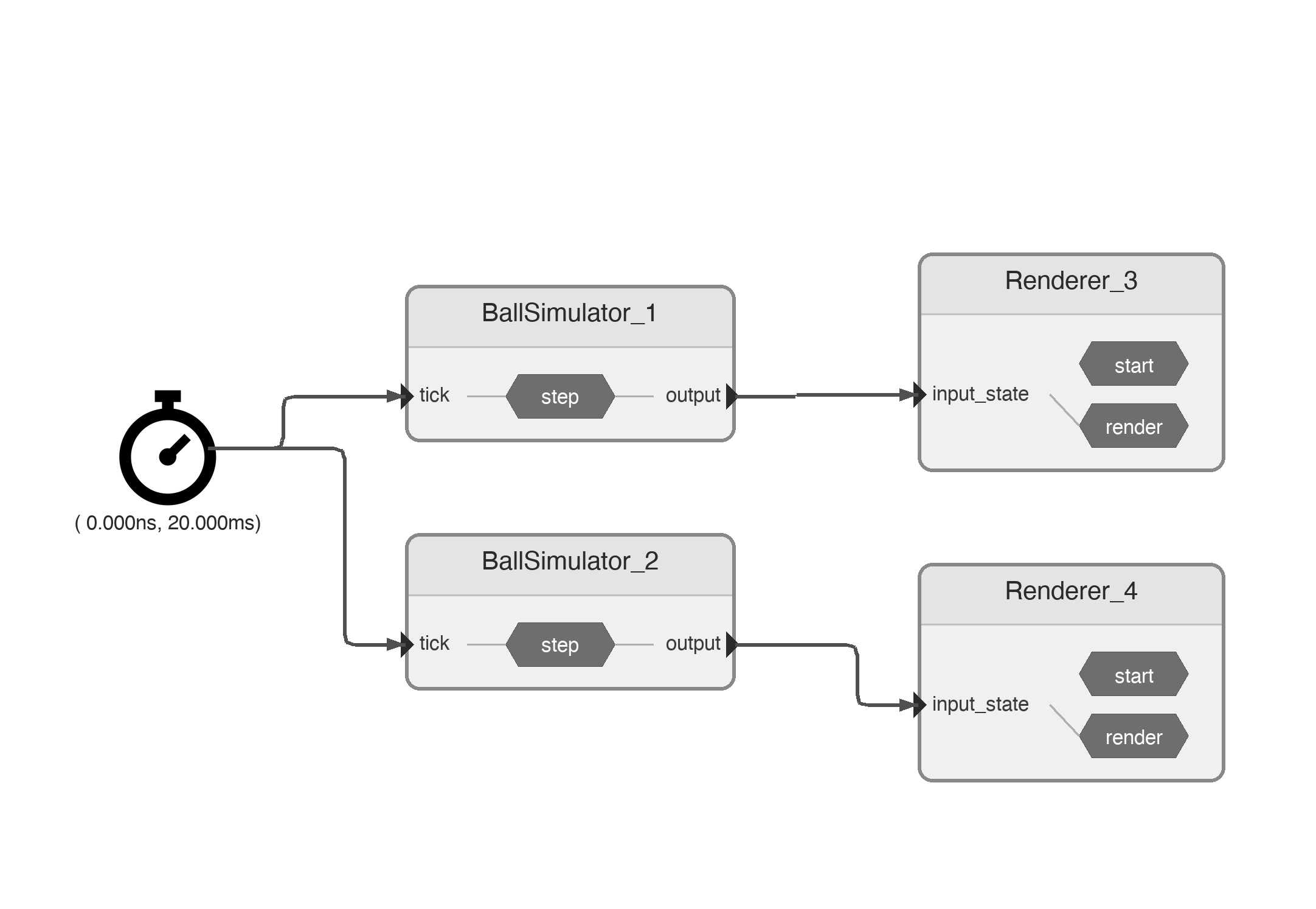
This example simulates two bouncing balls and visualizes them with Rerun.
Pipeline
Data
import numpy as np
import rerun as rr
class BallState:
def __init__(self, position: np.ndarray, velocity: np.ndarray, color: list[int]):
self.position = position
self.velocity = velocity
self.color = color
Nodes
from rosia import InputPort, OutputPort, reaction, Node, Application, request_shutdown, log
from rosia.config import RerunConfig
from rosia.time import Timer, Time, s, ms
import rerun.blueprint as rrb
@Node
class BallSimulator:
tick = InputPort[Time]()
output = OutputPort[BallState]()
def __init__(self, initial_position, initial_velocity, gravity=-9.81,
restitution=0.85, dt=0.02, max_ticks=100, color=[255, 100, 50]):
self.position = np.array(initial_position, dtype=float)
self.velocity = np.array(initial_velocity, dtype=float)
self.gravity = gravity
self.restitution = restitution
self.dt = dt
self.max_ticks = max_ticks
self.tick_count = 0
self.color = color
@reaction([tick])
def step(self):
self.velocity[2] += self.gravity * self.dt
self.position += self.velocity * self.dt
if self.position[2] <= 0.0:
self.position[2] = -self.position[2]
self.velocity[2] = -self.velocity[2] * self.restitution
self.output(BallState(self.position, self.velocity, self.color))
self.tick_count += 1
if self.tick_count >= self.max_ticks:
request_shutdown()
@Node
class Renderer:
input_state = InputPort[BallState]()
def start(self):
# Log static ground plane grid
lines = []
for i in np.linspace(-5, 15, 21):
lines.append([[i, -5, 0], [i, 15, 0]])
lines.append([[-5, i, 0], [15, i, 0]])
log.rerun(
rr.LineStrips3D(lines, colors=[[200, 200, 200]]),
rerun_subpath="ground",
)
@reaction([input_state])
def render(self):
state = self.input_state
log.info(f"ball {state}")
log.rerun(
rr.Points3D(
[state.position],
radii=[0.3],
colors=[state.color],
),
rerun_subpath="ball",
)
Wiring
app = Application()
timer = app.create_node(Timer(interval=20 * ms, offset=0 * s))
sim1 = app.create_node(BallSimulator(initial_position=(0, 0, 5), initial_velocity=(2, 1.5, 0), color=[255, 100, 50]))
sim2 = app.create_node(BallSimulator(initial_position=(0, 3, 5), initial_velocity=(2, 1.5, 0), color=[50, 150, 255]))
renderer1 = app.create_node(Renderer())
renderer2 = app.create_node(Renderer())
timer.output_timer >>= sim1.tick
timer.output_timer >>= sim2.tick
sim1.output >>= renderer1.input_state
sim2.output >>= renderer2.input_state
app.execute(
rerun_config=RerunConfig(
blueprint=rrb.Blueprint(rrb.Horizontal(rrb.Spatial3DView(origin="/")))
)
)
Run this and the Rerun viewer opens with:
- A 3D view showing two balls bouncing on a grid
- A timeline scrubber indexed by logical time and physical time
- Text logs from each node