Timer
This tutorial shows how to use a Timer node to drive periodic events.
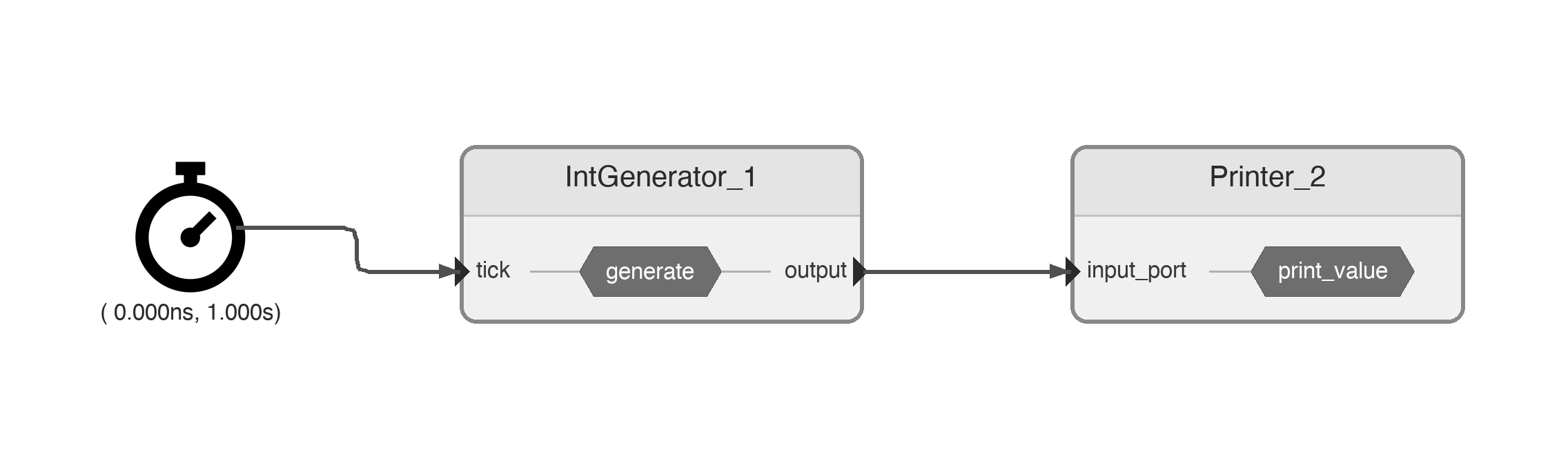
Pipeline
Timer -> IntGenerator -> Printer
A Timer fires at a fixed interval. Each tick triggers IntGenerator to produce the next integer, which Printer logs.
Timer
Timer is a built-in source node that emits its logical time at a fixed interval. It has one output port, output_timer, of type Time.
timer = app.create_node(Timer(interval=1 * s, offset=0 * s))
interval— time between ticks.1 * smeans one tick per second.offset— logical time of the first tick.0 * smeans the first tick fires immediately.
The timer runs indefinitely until the application shuts down. To stop it, call request_shutdown() from any node.
Nodes
from rosia import InputPort, OutputPort, reaction, Node, Application, request_shutdown, log
from rosia.time import Timer, Time, s
@Node
class IntGenerator:
tick = InputPort[Time]()
output = OutputPort[int]()
def __init__(self):
self.count = 0
@reaction([tick])
def generate(self):
log.info(f"tick: {self.tick}")
self.count += 1
self.output(self.count)
if self.count >= 5:
request_shutdown(1 * s)
@Node
class Printer:
input_port = InputPort[int]()
@reaction([input_port])
def print_value(self):
log.info(f"Result: {self.input_port}")
Wiring
app = Application()
timer = app.create_node(Timer(interval=1 * s, offset=0 * s))
gen = app.create_node(IntGenerator())
printer = app.create_node(Printer())
timer.output_timer >>= gen.tick
gen.output >>= printer.input_port
app.execute()
Output:
[IntGenerator_1] tick: 0.000ns
[Printer_2] Result: 1
[IntGenerator_1] tick: 1.000s
[Printer_2] Result: 2
[IntGenerator_1] tick: 2.000s
[Printer_2] Result: 3
[IntGenerator_1] tick: 3.000s
[Printer_2] Result: 4
[IntGenerator_1] tick: 4.000s
[Printer_2] Result: 5
Logical time
Each message in Rosia carries a logical timestamp. The Timer emits timestamps at its configured interval: 0ns, 1s, 2s, etc. These are logical times — labels that order messages — but by default Rosia
pins them to wall-clock time too: see realtime mode. Running the example above takes ~5 s because each tick is gated on physical time. To make it run as fast as the CPU allows (useful for tests), pass
realtime=False to the Application:
app = Application(realtime=False)
Notice the output above: IntGenerator receives tick 0.000ns first, then Printer sees Result: 1, then tick 1.000s, then Result: 2, and so on. Rosia guarantees that all nodes process messages in logical time order. Even though
IntGenerator and Printer run in separate processes, Printer will never see Result: 2 before Result: 1.
Time units available: s (seconds), ms (milliseconds), us (microseconds), ns (nanoseconds). For example, 500 * ms is half a second.
Key points
Timeris a built-in source node that emits its current logical time at a fixedinterval.IntGeneratorreacts to each tick by incrementing a counter and sending it downstream.request_shutdown()stops the application after 5 ticks.- The
>>=operator connects an output port to an input port.