Synchronization
This tutorial builds on the Timer tutorial. Instead of having just one timer and integer generator, now two independent timers drive two integer generators, and a single printer receives both streams and verifies they are synchronized.
Pipeline
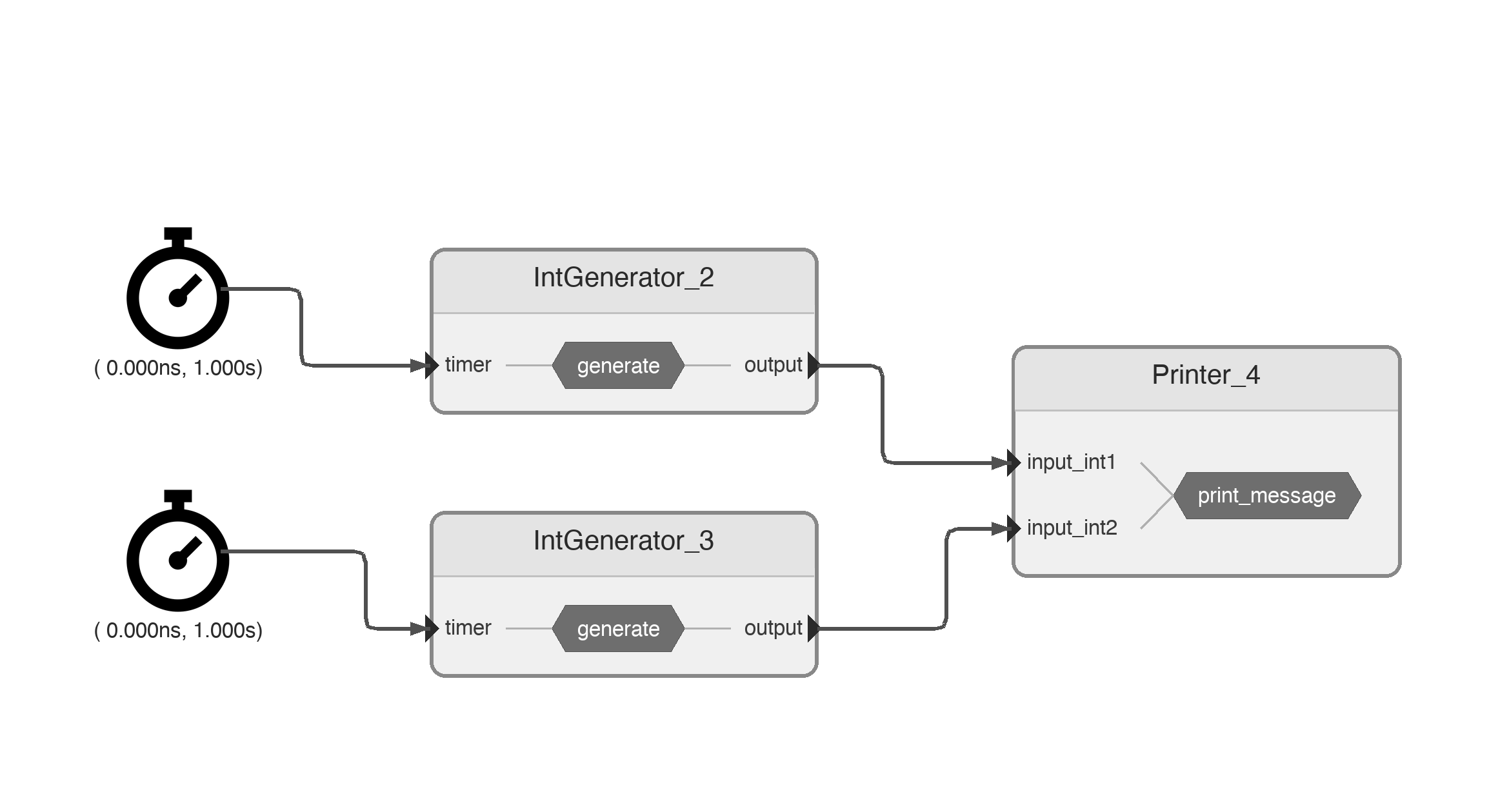
Two timers tick at the same interval and offset. Each drives its own IntGenerator. The Printer has two input ports and reacts when both have a value at the same logical time.
Nodes
from rosia import InputPort, OutputPort, reaction, Node, Application, request_shutdown, log
from rosia.time import Timer, Time, s
@Node
class IntGenerator:
timer = InputPort[Time]()
output = OutputPort[int]()
def __init__(self):
self.count = 0
@reaction([timer])
def generate(self):
self.output(self.count)
self.count += 1
@Node
class Printer:
input_int1 = InputPort[int]()
input_int2 = InputPort[int]()
def __init__(self):
self.receive_count = 0
@reaction([input_int1, input_int2]) # Fire when EITHER port receives a message
def print_message(self):
assert self.input_int1 == self.input_int2, "Input ports should have the same value"
log.info(f"Received: {self.input_int1} {self.input_int2}")
self.receive_count += 1
if self.receive_count >= 3:
request_shutdown()
Wiring
app = Application()
timer1 = app.create_node(Timer(interval=1 * s, offset=0 * s))
timer2 = app.create_node(Timer(interval=1 * s, offset=0 * s))
int_gen1 = app.create_node(IntGenerator())
int_gen2 = app.create_node(IntGenerator())
printer = app.create_node(Printer())
timer1.output_timer >>= int_gen1.timer
timer2.output_timer >>= int_gen2.timer
int_gen1.output >>= printer.input_int1
int_gen2.output >>= printer.input_int2
app.execute()
Output:
[Printer_4] Received: 0 0
[Printer_4] Received: 1 1
[Printer_4] Received: 2 2
Why does this work?
Both timers tick at the same interval, so IntGenerator1 and IntGenerator2 produce messages at the same logical timestamps. When Printer reacts at logical time 0s, both input_int1 and input_int2 hold the value 0. At 1s, both
hold 1, and so on.
The assert never fails because Rosia guarantees that a reaction sees all port values at the same logical time. Even though the two generators run in separate processes and may finish at different wall-clock times, Printer will not fire
until both values for that timestamp are available.
This is the key difference from callback-based and pub-sub frameworks: you don't need locks, queues, or manual synchronization. Rosia handles it automatically based on logical time.
Key points
- A reaction listing multiple input ports (
@reaction([port1, port2])) fires when any listed port receives a message. - When the reaction fires, all ports reflect their values at that logical time.
- Two independent pipelines producing messages at the same logical time are automatically synchronized at the consumer.